![]()
![]()

Possibilities in design education using tiny computers
-Fundamental research for education of man-machine interface design-
![]()
![]()
![]()
![]()
![]()
![]()
今日の我が国では、ロボットに対する人々の関心が 高まっている。ロボットは、かつては産業用に開発され、生産の自動化に大きく貢献していた。いまでは、それらは一般の家庭向けの開発が盛んである。特に二足歩行のロボットは、自動車メーカをはじめ、家電メーカ、ゲームメーカまたは中小企業や各自治体などでも盛んに研究開発が行われ、その技術は日々進歩している。
これらの開発の中で、今日注目されていることは、ロボット達がいかに私たちと円滑なコミュニケーションをとることができるかということである。ロボットの最も大きな特性はヒトとのコミュニケーションにおいて身振りや手振り、表情、発音、ポーズを用いることができることである。
ロボットが私たちの日常生活に入り込もうとしている現在、モノづくり教育のなかで私たちは、ロボットと人間との間に生じる非言語的コミュニケーションを円滑に行うためのマン-マシンインタフェースデザインを考えることのできる人材を育成する必要に迫られている。
本教育は、小型コンピュータを用いて、学生がコンピュータによる機器の制御技術を学びながら、ヒトとロボットの関わり方のデザイン「マンーマシンインタフェースデザイン」をすることのできる教育環境を構築し、その有用性について評価することを目的としている。
![]()

![]()
図1 The Handy Cricket

![]()
図2 LOGO Blocks
教育上のポイントは以下の通りである。1)コンピュータによる制御を理解する。2)アイデアスケッチから制作までを記録し、学生がリフレクションすることを可能にする。3)ロボットの基本的な動きに必要な機構と制御プログラムを理解する。4)心地よく感じることのできる「しぐさ(motion)」を発見する。
1-1 小型コンピュータ
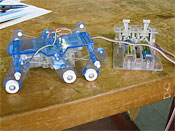
制御に用いた小型コンピュータは、「The Handy Cricket(以下「クリケット」)」と呼ばれるコンピュータである(図1)。この小型コンピュータは2系統の出力端子と2系統の入力端子を持つ。出力端子にはモータ、LEDなどを接続することができ、また、入力端子には光センサ、タッチセンサなどのセンサやスイッチを接続し、アナログ入力とデジタル入力を選択することができる。プログラムは特別な知識を必要としないGUIベースのLOGO BLOCKSを用いた(図2)。
1-2 教育プログラム
授業は2004年4月から6月まで、計6回かけて行われた。
1)アイデア創出の時間
多くの学生にとって、動きの伴ったモノを作ることは初めてであった。そこで、基本モデルの説明書を模写することによって、組み立て説明図を描き、構造 物を組み立てていくプロセスを理解できるようにした。
2)ロボットの制作
ロボットの制作には以下の条件を課した。 1)人間にとって心地よい動き(おもしろい動き)をすること。2)決められた範囲で動くこと(90×180 cmのテーブル上)。3)決められた1分間で動作を完了させること。4)動きの基本部分は決められた機構部品を用いること。
1-3 評価
私たちは、学生の作品を以下の基準で評価した。1)規定の条件を満たしているか。2)おもしろい動きを表現できているか。3)自分の描いた図にあった構造物ができているか。4)制作過程をリフレクションすることができたか。
1-4 制作プロセスの記録とリフレクション
私たちは学生の制作プロセスを詳細に記録するよう心がけた。記録にはデジタルカメラおよびビデオを用いた。学生は記録された自分たちの制作プロセスを見ながら、リフレクションを繰り返すことによって失敗に至る過程を検証できるようにした。
![]()
![]()
図3 基本モデルとして用いられた田宮模型製玩具
![]()
図4 動きのアイデアスケッチ

![]()
図5 アイデアを実際のかたちと動きに落とし込むための作業

![]()
図6 動きにあった外装を制作する

![]()
図7 学生がリフレクションを行うための専用webサイト
はじめに学生は、用意された基本モデルを説明図に従って組み立てた(図3)。学生達は組み立て説明図の表現が分かりやすいかを検証した。この検証によって学生は、モノを構成するときに必要な「手順」について理解することができた。
2-2 リデザイン(アイデアスケッチ)
彼らは基本モデルを詳しく観察し、新しい動きのアイデアを考えた。基本モデルは"insect"と名付けられている。この基本モデルは6つの足を交互に動かして、昆虫の歩く様子に似ている。学生は、この規則的な動きから、新たな表情のアイデアを考案した(図4)。
2-3 基本モデルからの応用
学生達はアイデアスケッチをもとに、基本モデルを新しい表情を持ったロボットに作りかえていった。 制作過程の中で、学生の多くはアイデアと実際の制作 に大きな違いがあることを知った。彼らは、今まで考えたことはなかった 重量バランス、モータやギアのパワー(トルク)、配線の配置方法などを考慮したうえで、 全体をデザインすることを求められた。彼らはアイデアスケッチ、動作のプログラミング、外装の製作を繰り返すことによって、表現したい動きの実現を試みていた(図5)。
2-4 外装の調整
駆動部分のデザインが終わると、最後に外装のデザインにはいった。彼らは、クレイやスチロールなどのさまざまな素材を用いて外装を調整した(図6)。
2-5 作業の記録とポートフォリオの作成
私たちスタッフは、デジタルカメラおよびムービーで作業の詳細を記録し、専用Webページに掲載した(図7)。学生たちはこれらのデータをもとに、ロボットのアイデアから制作に至る課程をポートフォリオとしてまとめることが最終的な課題となった。
![]()
本教育プログラムから、以下の知見を得た。
1)制御ツールとしてのコンピュータ活用
2)プロセスの記録とリフレクションの重要性
3)新しい仕草としてのロボットデザイン
この教育プログラムを通して、私たちはモノづくりを志す学生にマン-マシンインタフェースデザインの基本的な理解を求めることができた。これにより学生は、ヒトと機械の間に生じる関係性をデザインするという概念を習得し、具現化することができるようになった。
関係性の理解は、単に工学的な見地からだけではなく、さまざまな分野において多角的に物事をとらえる能力を養成する、基本要素であると考える。
- Takasuke Sonoyama, The meaning and the possibility of a robot design as a network device, The 17th Annual Conference of the Japanese Society for Artificial Intelligence, 2003.
- F. Marth, B. Mikhak, and B. Silverman. Meta Cricket: A designer's kit for marking computational devices -Author bios. IBM Systems Journal, volume 39, Number 3 & 4, 2000, MIT Media Laboratory.
- Possibilities in design education using tiny computers - Understanding Motion Design -, Tomoyuki Sowa, Jiro Sagara, Makoto Yamaguchi, David A. Richardson, 6th ADC, 2002.
![]()
![]()
![]()