![]()


図7
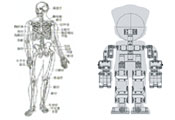
図8/図9

図10

図11

図12
2-3 モーションデザイン
「2号機」の開発にあたっては、 チラシをつかんで配布する基本的な動きに加えて、「かわいらしさ」を表現する動きを盛り込むために、「動きのデザイン(モーションデザイン)」を行い提案した。また、その動きが再現できる構造デザインを行った。
まず、幼児特有のかわいい「首のかしげ」を採用し、人の心に安らぎを与えるこの動きにより人と機械の心地よいコミュニケーション創造を目指した。さらに、歩幅の少ないヨチヨチ歩きをデザインすることで、機械に頑張れと応援したくなる気持ちをいだかせるようデザインした。(図7)
人間の構造上ありえない不自然な動きは、結果として恐怖感や嫌悪感を抱かせる。ロボットにはどんな動きをさせることも可能だが、優れたモーションデザインとしては、人間の記憶の中にある自然な動きをいかに効果的に再現するかが重要だと考える。また、モーションデザインによって、機械の性能を補ってくれるような人の気持ちを創造することもできる。
2-4 3頭身プロポーションの骨格フレームデザイン
既存の人型ロボットの骨格は、人間の骨格とは全く違うことに当初は驚いた。脚の構造が胸の部分にまでおよび、人間の腹部が存在しない脚長の骨格となる。何をせずともかっこいいプロポーションである。人間の関節は、多自由度の球体関節であり、関節部はスリムで筋肉部にボリュームがある。現状の人型ロボットは動力に1自由度1関節の小型モー ター=アクチュエーターを採用している。可動範囲の大きい人間の関節の動きに近づけるには、ロボットの関節部の狭い空間に複数のアクチュエーターを搭載することになり、関節周囲が肥大化する。人間のスタイルとは全く逆のイメージとなる。(図8、図9)
脚の骨格が胸まである全体プロポーションや人間とサイズの異なる肥大化した手首足首、これらを「幼児っぽくかわいらしい」骨格に近づけるために、動きを損なわない範囲での新たなモーター配置とフレーム構成の検討から進めていった。脚を短く見せる工夫として、脚部モーターを横に並べ、一部は隠すために外装の腹部カバーを配置した。さらに、幼児らしいなで肩に見えるように胴体と肩の位置を調整した。
2-5 外装デザイン
かわいい3頭身プロポーションの骨格フレームの上に、外装をデザインしていく。外装はロボットの姿かたちであり、人格であり、人との接点=インタフェースである。つまり、外装は単なるスタイリング=装飾付加的なものでなく、最も重要な本質的機能である。
以上のことは開発後強く感じた。
静止時はもちろん、動作時の立ち居振る舞いにおいても美しさが求められる。
そこで、内蔵部品が露出しないように極力違和感のないように全体をカバーしていった。
先述のようにロボットは可動部=関節が多く、一連の動きを外装が邪魔をしないように美しく表現させることは至難の技であった。ロボットの動きとは、見る人にとっては外装の動きである。美しい動きを創造するため、関節部の外装による干渉問題を一つ一つ解決していった。パーツごとに簡易モデルを作成し各関節ごとに可動させ現物確認を行っていく。
中の部品を極力見せず、動きに干渉しない最大公倍数的な外装デザイン・・・。気の遠くなる作業が続いた。(図10、図11)
関節の問題を解決しながら、乳幼児のふくよかなディティールデザインを外装の各造形に落し込んだ。3頭身であるため大サイズの頭部と全体のバランスを考慮し、手足も大きくデザインした。(図12)
![]()
![]()
![]()